Project Overview
This simulation demonstrates the capabilities of an autonomous drone navigation system that operates without GPS reliance. Using sensor fusion techniques and advanced PID control algorithms, the drone can maintain stable flight even in challenging wind conditions.
Key Features:
- Kalman filtering for state estimation
- Finite State Machine (FSM) for behavior control
- Realistic sensor simulation with appropriate noise profiles
- Advanced PID controller with wind compensation
- Comprehensive visualization of drone behavior
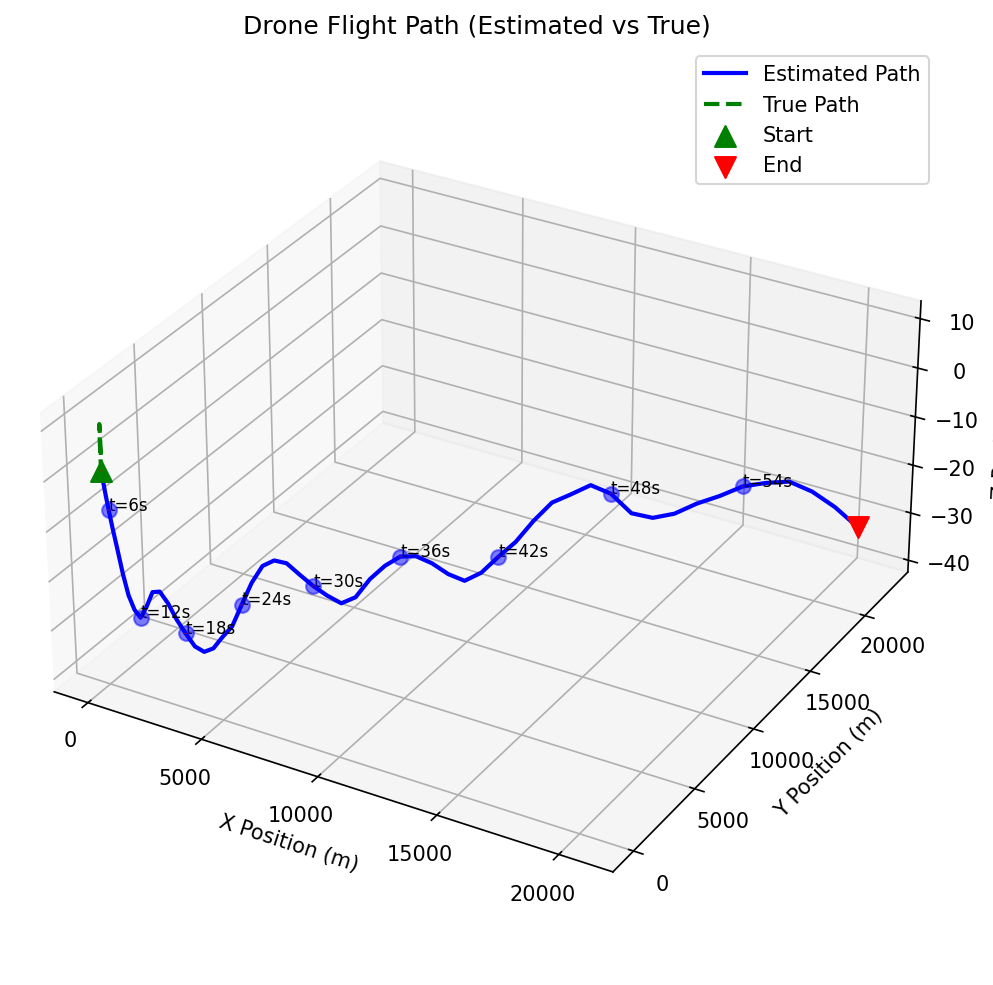
3D Flight Trajectory
Visualizing the drone's flight path in three-dimensional space, showing estimated position versus actual position.
Simulation Results
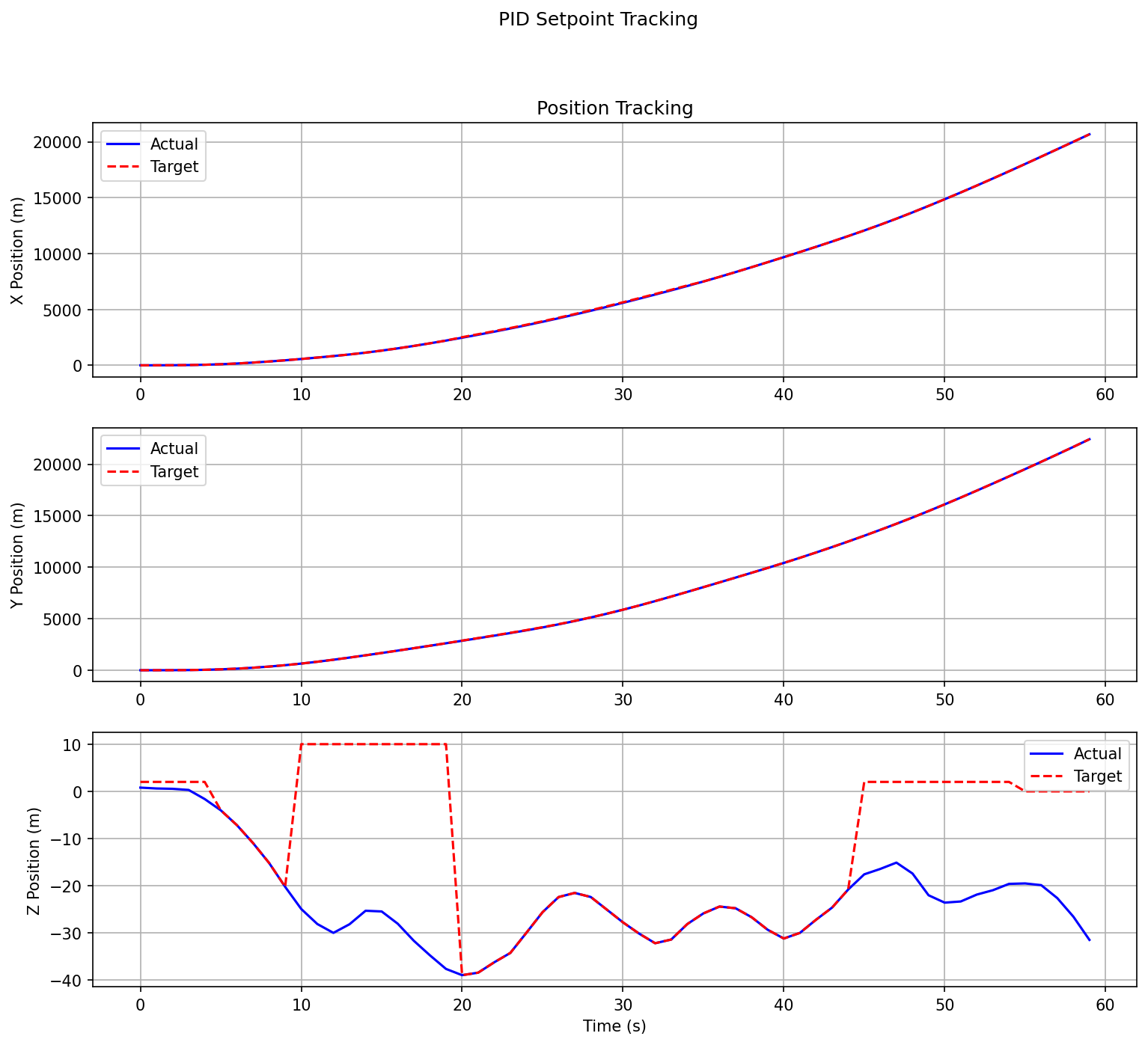
Position Tracking
This plot shows how well the drone follows target positions along X, Y, and Z axes. The blue line represents actual position, while the red dashed line shows the target position.
Note how the drone maintains stable flight despite environmental disturbances. The Z-axis (altitude) shows the most significant challenges in maintaining the target due to wind effects.
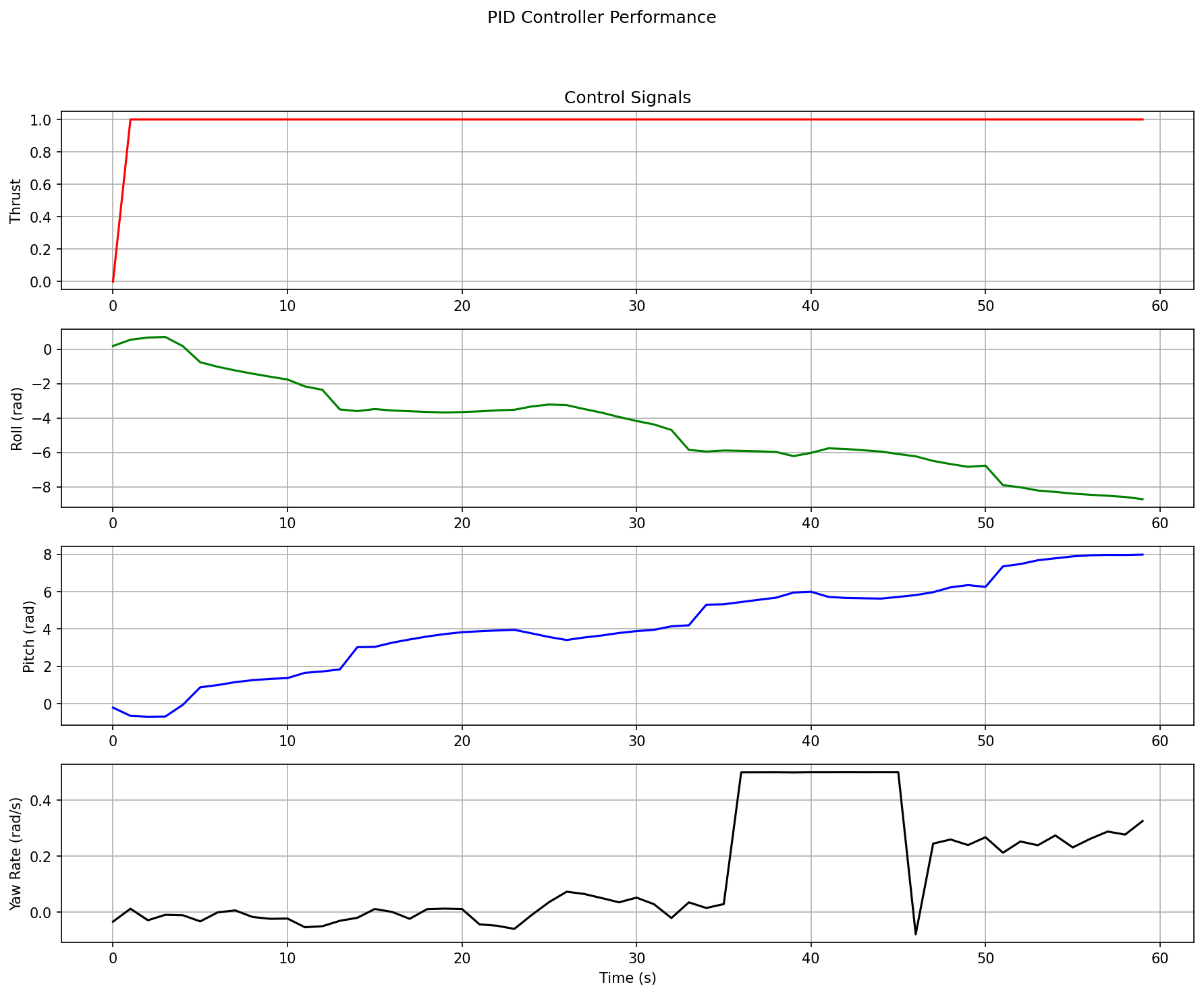
PID Control Signals
This visualization shows the control signals generated by the PID controller during flight. The thrust, roll, pitch, and yaw rate signals demonstrate how the controller adjusts to maintain stability.
Notice how the controller generates stronger corrections when facing wind disturbances, particularly visible in the roll and pitch signals.
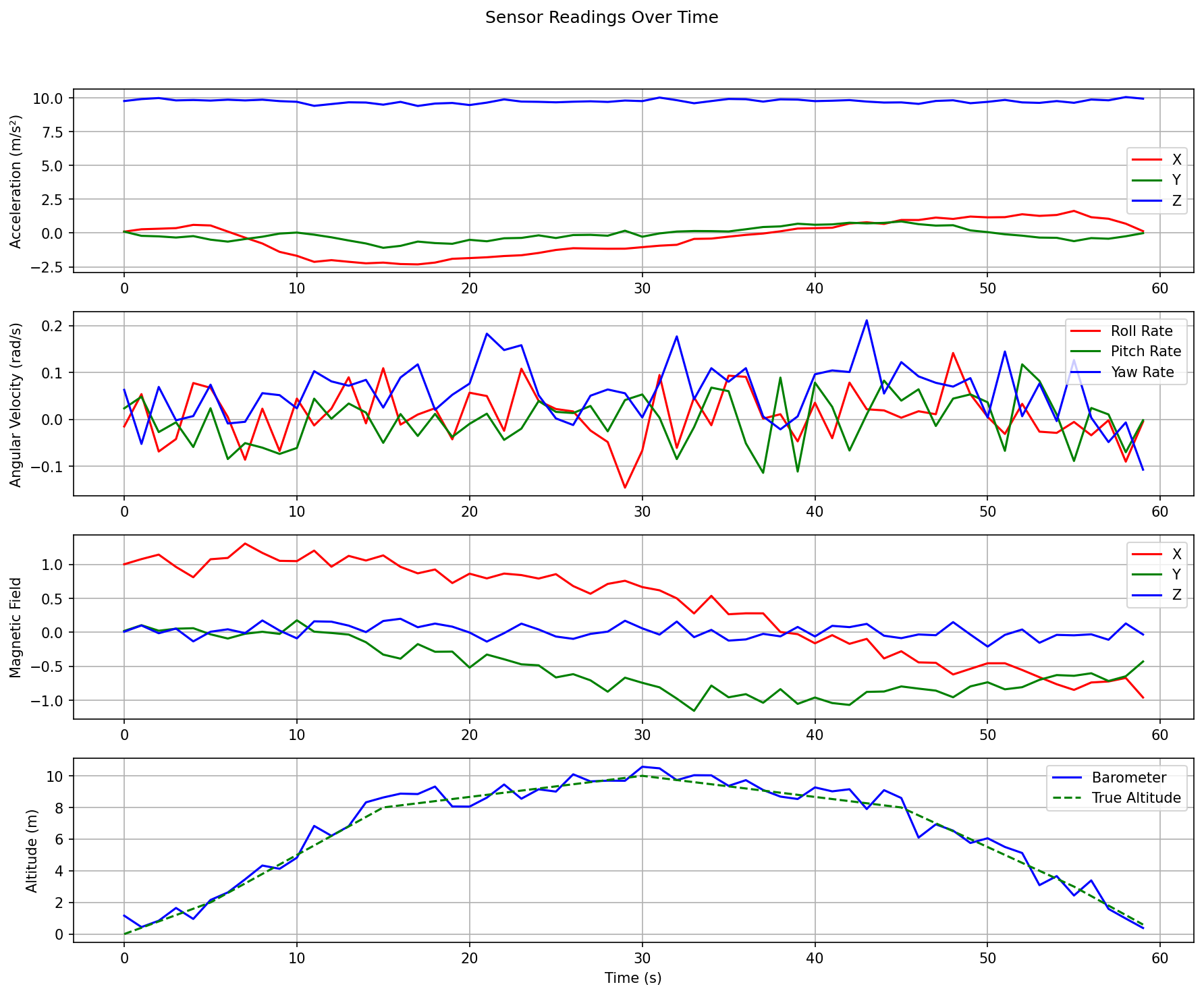
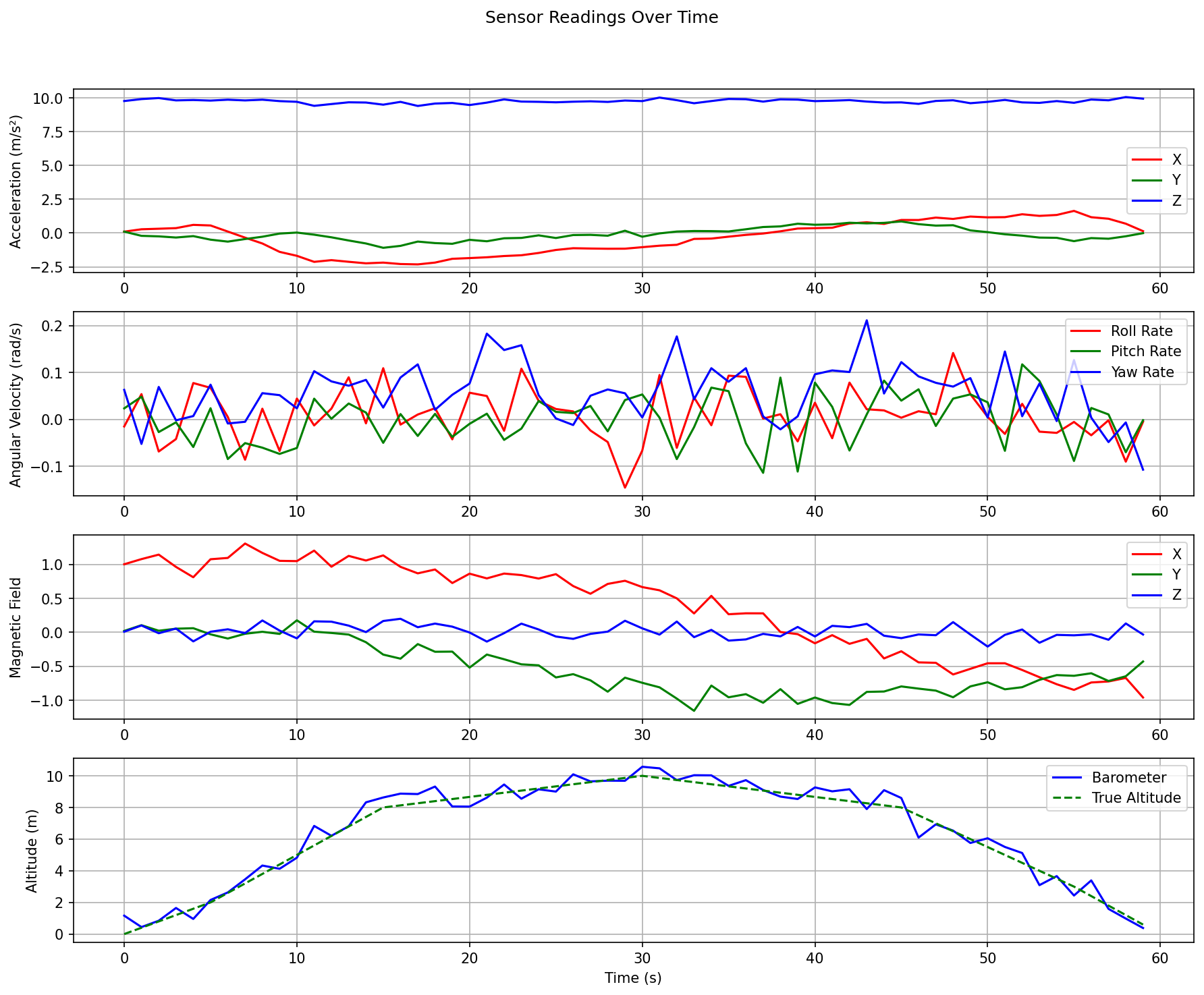
Sensor Data
This plot displays raw sensor readings from the drone's IMU (accelerometer, gyroscope), magnetometer, and barometer.
The realistic noise patterns and drift demonstrate the challenges of state estimation in real-world conditions.
Environmental Forces
This visualization shows the environmental forces affecting the drone, primarily wind forces and their direction over time.
Notice how wind gusts create sudden peaks in the force magnitude, challenging the controller to maintain stability.
Wind Scenarios
The simulation includes several wind scenarios to test drone stability in different conditions. Each scenario presents unique challenges for the flight controller.
| Scenario | Wind Speed | Description |
|---|---|---|
| Calm | 0-1 m/s | Almost no wind, ideal flying conditions |
| Light | 1-3 m/s | Light breeze with minimal impact on flight |
| Moderate | 3-5 m/s | Moderate wind requiring active compensation |
| Strong | 5-8 m/s | Strong wind creating significant drift |
| Stormy | 8-12 m/s | Storm conditions with extreme turbulence |
| Gusty | Variable | Unpredictable gusts testing rapid adaptation |
Wind Scenario Selection
Moderate wind requiring active compensation from the PID controller. This scenario demonstrates the effectiveness of wind compensation algorithms in maintaining flight stability.
PID Controller & Wind Compensation
Enhanced PID Controller
The drone uses several PID controllers to maintain stability:
- Altitude Controller: Controls vertical movement and height
- Position Controllers: Control X/Y movement in horizontal plane
- Orientation Controllers: Manage roll, pitch, and yaw angles
Our enhanced PID controller includes advanced wind compensation mechanisms:
- Adaptive Scaling: Increases compensation proportionally to wind strength
- Wind Integral Terms: Accumulate persistent wind effects for better compensation
- Velocity Damping: Adds damping based on velocity to improve stability
- Feedforward Compensation: Uses wind measurements to anticipate required corrections
PID Tuning Parameters
About the Project
This simulation project demonstrates advanced drone control techniques in challenging environments. It was developed as a research project to explore autonomous navigation without reliance on GPS.
Technical Implementation:
- Advanced Control Theory: PID controllers with adaptive wind compensation
- Sensor Fusion: Kalman filtering to estimate state from noisy sensor data
- Decision Making: Finite State Machine for high-level behavior control
- Environmental Modeling: Realistic wind dynamics with turbulence and gusts
- Data Visualization: Comprehensive visualization of flight data and performance metrics
Future Directions:
- Advanced PID tuning using Ziegler-Nichols or genetic algorithms
- Obstacle avoidance and path planning
- Battery simulation with intelligent landing
- Multi-drone swarm support
- Real-time dashboard with 3D visualization
Project Structure
This project is organized into core components:
core/- Core drone logic and state managementinfrastructure/- Sensor simulation and environmentpresentation/- Visualization and logging
Implementation Languages
See the GitHub repository for full source code and documentation.